
知识|多视觉传感器CAN总线检测系统的设计
引言
随着计算机技术、人工智能、光电检测、图像处理以及模式识别等各学科的不断完善和互相渗透,视觉检测技术作为一种多领域、各学科交叉的技术已取得了突飞猛进的发展,它是以机器视觉为基础的新型测试技术,具有测量时非接触、速度快、信息量大、应用领域广等特点。视觉检测技术广泛用于产品质量在线监测,自动巡视商店、银行或其他重要场所的安防监视,产品的标签文字标识检查,纺织印染业中的自动分色、配色,大型物体三维结构尺寸的测量,各种复杂三维表面形状的检测、恢复重构以及逆向工程等很多领域。视觉检测系统通常是由计算机、视觉传感器与控制系统三大模块组成。对于多视觉传感器大型实时测量系统,为了让视觉检测系统快速、精确地获得理想的图像信息,视觉传感器的控制系统的作用尤为重要。视觉传感器的控制系统根据其使用的串行控制总线标准不同,其控制与通讯的性能将不同。
这里采用CAN (Controller Area Network) 总线作为系统的串行控制总线。由于CAN 总线具有通讯速率高、实时性好、带负载能力强、可靠性及抗干扰能力好、总线利用率高及硬件成本低等优点,非常适于大型测试系统控制网络的通讯。因此,本文将基于CAN 总线分布式网络控制技术,介绍多视觉传感器的实时控制方法与控制系统的设计。
视觉传感器的检测原理与系统组成
视觉检测一般基于三角法,由摄像机、光源跟被测物体构成测量三角,CCD 相机把光源投射到被测物体表面的经过调制后的三维深度信息转换成二维图像传给计算机再经由图像处理、特征提取等恢复解调出被测物体的三维形貌信息。如图1 所示,简单的结构光视觉传感器可由一个平面结构光投射器L 与一个CCD 摄像机A 组成,但当被测物体表面曲率变化较大时,有时会出现死区现象,即光平面与物体表面的交线被旁边的曲面遮挡,使摄像机无法看到该交线,以致测量信号消失。为避免由测量复杂表面物体时产生的死区现象,可用两个相机A 和B 对称分布于光平面两侧,接收光条的漫反射光。本例使用波长为650nm 的红色激光器作为光源,因其与环境光反差大,干扰小,较易进行图像特征点的提取,双目视觉传感器组成的多视觉传感器测量系统为研究对象,研究其CAN 总线分布式网络控制技术。
图2 给出了多视觉传感器CAN 总线网络控制检测系统的基本组成原理。本系统采用主从式结构,上位机为PC 机,下位机为8051 单片机控制单元(MCU) ,上、下位机之间用CAN 总线进行通讯,由于PC 机中并不带CAN 总线接口,因此需要一个CAN 接口卡,这里选用USBCAN 智能接口卡来通信,因其具有体积小、外置且即插即用等特点。这样,PC 可通过USB总线方便地连接至CAN 总线网络,控制各个CAN 节点,进行数据采集和处理。
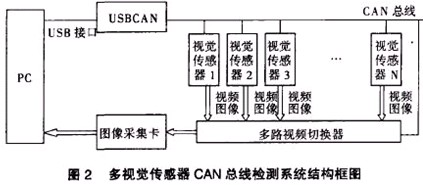
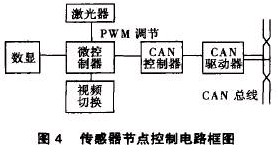
视觉传感器的控制电路(MCU) 主要包括视频切换、电源供给和CAN 通讯接口三个模块。电源供给电路模块提供CCD 摄像机、激光投射器与MCU的电源,并且由MCU 控制单元控制着它们的开启与关闭。为了避免激光投射器使用时间过长导致激光器( 或普通照明光源) 发热引起光能分布不稳或视觉传感器受热变形从而影响测量精度,以及延长投射器的使用寿命,我们采用如下的控制方式: 当传感器开始测量时,先上电初始化,再打开激光器,测量完毕后即关闭光源电源。由于每个传感器里面含有一到两个CCD 相机,而任一时刻传感器只能输出一路视频信号,因此需要视频切换开关对二路视频信号进行自动分时切换。 为了满足大尺寸物体的视觉检测需要,充分利用CAN 总线的特点,使整个控制系统具有积木式的可扩充能力,本控制系统按最少能带64 个传感器的负载能力进行了设计。如果设每个视觉传感器里面都有两个摄像机,即最多共有128 路视频输入,而任一时刻系统只选取其中一路视频图像传给计算机图像采集卡进行图像采集处理,因此在图2 每个视觉传感器的单路视频输出处,需再加上一个多路视频切换器,如图3 所示,每8 个视频输入1 路视频输出作为一个视频信号切换单元,实现8 选1 方式的视频切换。那么按图3 中的积木式连接方式,9 个单元就可驱动64 路传感器。每个视频切换单元都有自己的CAN 总线接口,连接到整个控制系统的分布式网路上,与单个传感器控制系统一起协同工作。我们采用8 选1 视频切换为一个单元,采用积木式结构进行扩充,主要是考虑到在实际的多视觉传感器测量系统中,对于具体不同的测量对象,使用的传感器的数目可能不同。这种方式的最大优点是可以根据使用的传感器的多少进行自由组合。 在检测系统中,我们分别采用了MAXIM 公司的视频复用放大器max4313 和max4315 进行多路视频信号的切换传输。在双目视觉传感器内部用单片机控制max4313 进行二选一视频切换。max4313 和max4315 是低功耗高速多路视频复用放大器,增益均为+ 2V/ V ,具有通道切换速度快、切换瞬变低、差分增益误差低、相位误差小等良好的视频特性,本例中用±5V 的双电源供电。由于视频信号频率较高,频带较宽,因此当两路视频信号相距较近时容易产生串扰,为了尽量减小串扰,要把数字模块与视频切换模块在一个板子上分成二个区域,以及尽可能减少视频引线的长度并注意使用75Ω 匹配电阻,视频引线使用带屏蔽层的优质视频同轴电缆。


")
")


评论排行