
乔红院士团队最新综述 | 受人启发的智能机器人:决策、感知、系统和控制
【ZiDongHua 之自动化学院派收录关键词:中国科学院自动化研究所 机器人 】
乔红院士团队最新综述 | 受人启发的智能机器人:决策、感知、系统和控制
以下文章来源于中国科学信息科学 ,作者SCIS
导语 | 近日,中国科学院自动化研究所乔红院士团队以 Improving performance of robots using human-inspired approaches: a survey 为题发表综述论文,从受行为机制启发和受神经机制启发两个方面,梳理了受人启发的智能机器人在决策、感认知、系统设计和运动控制方面的前沿研究成果,旨在促进读者对受人启发机器人的理解,对通过深度融合神经科学、信息、机械、控制研发新一代机器人系统带来启发。论文发表于《中国科学信息科学》。
研究意义
机器人对国民经济和国防事业都有不可替代的重要作用。普通机器人高性能作业能力,包括高精度、高可靠和高柔顺等,是机器人领域核心问题之一,也是其广泛高端应用的主要瓶颈,被我国和美国都列为机器人战略的核心问题,对我国的机器人发展意义尤为突出。
提高普通机器人的性能通常需要机械、材料等多个研究领域的协同开发,造成系统成本过高甚至某些任务无法实现。相比之下,人能够在计算能耗有限、传感和运动的绝对精度较低的情况下,通过不同脑区之间的信息融合以及充分利用自身结构的柔顺性,能够实现远高于单元精度的整体性能。因此,通过模拟人的神经机制与结构机理,研制受人启发的机器人系统,对于提升机器人系统性能具有重要意义。
本文工作
本文从受行为机制启发和受神经机制启发两个方面,综述受人启发的智能机器人在决策、感认知、系统设计和运动控制方面的前沿研究成果,旨在促进读者对受人启发机器人的理解,为通过深度融合神经科学、信息、机械、控制研发新一代机器人系统带来启发。

在受人启发的机器人决策方面,本文综述了受人利用环境启发及受人神经机制启发的机器人决策的研究进展。
在受人利用环境启发的决策中,从模仿人类行为的角度介绍了基于环境吸引域的仿人操作策略的相关研究,包括仿人策略的提出、发展和应用,阐明了相关研究对于提升机器人在有限本体精度和有限传感精度下实现高性能作业的能力所产生的重要影响。
在受人神经机制启发中,介绍了情绪调节的神经决策机制及其在实现准确性和效率平衡方面的优势,以期促进对人决策机制的研究和应用,并提高机器人在高性能作业中的精准决策能力。
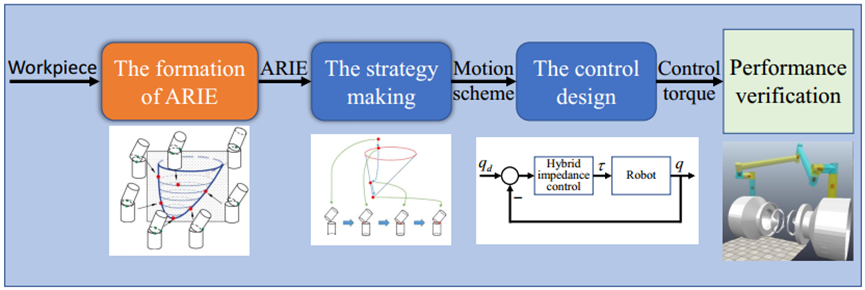
受人操作行为启发的环境吸引域理论
在受人启发的机器人感认知方面,本文对受人视觉行为中知觉流形启发的流形降维方法以及受人视皮层神经机制启发的机器人感认知方法进行了研究综述。机器人与复杂开放环境交互是一个主动、动态和连续的过程,对机器人视觉感认知模型的稳定性、快速性和鲁棒性提出了很高的要求,需要的精度、能效和速度之间取得平衡。
本文首先综述了受知觉流形理论中神经回路不变性解码特性启发的流形降维感认知方法,总结了利用低维流形结构实现高维视觉数据快速处理的研究进展;进一步,对人类视觉感知神经环路的关键机制进行了介绍,并综述了受视皮层V1-V4通路、下颞叶皮层IT区、前下颞叶皮层AIT区机制启发的机器人感认知方法研究进展,以期为实现机器人“精度-能效-速度”均衡的高性能感认知方法带来启发。
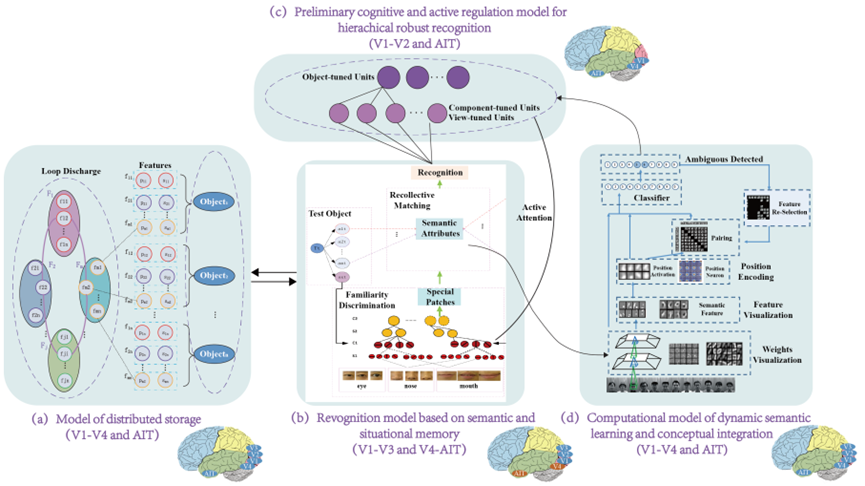
受视觉神经环路启发的机器人感认知算法
在系统设计与运动控制方面,本文首先综述了模仿人类外形结构特征设计的仿人机器人系统代表性成果,并围绕双足移动与操作控制所面临的技术挑战,介绍了目前的研究进展。进一步,本文对近期机器人与神经科学交叉融合所取得的研究进展进行了梳理,从运动控制的关键神经机制、生物启发式运动控制以及肌肉骨骼机器人系统设计等方面介绍了受人启发的智能机器人研究进展,以期进一步促进机器人与多学科的交叉融合,为突破机器人实现整体性能高于单元器件性能的关键瓶颈、研制新一代机器人系统带来新思路。
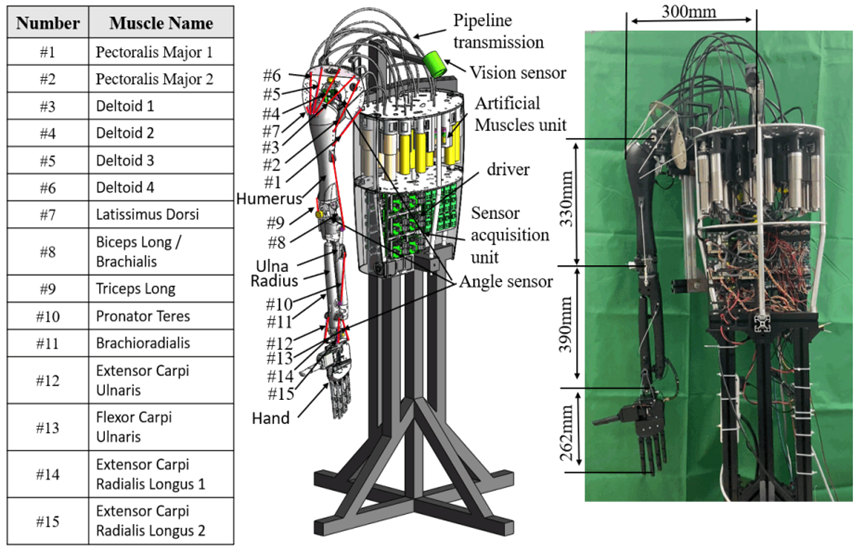
受人启发的肌肉骨骼机器人系统
文章信息:
Hong QIAO, Shanlin ZHONG, Ziyu CHEN & Hongze WANG. Improving performance of robots using human-inspired approaches: a survey. Sci China Inf Sci, 2022, 65(12): 221201, doi: 10.1007/s11432-022-3606-1
我要收藏
个赞







评论排行