
清华大学李骏院士团队:从单车到自动驾驶编队的纵横向控制方法
清华大学李骏院士团队:从单车到自动驾驶编队的纵横向控制方法

近日,清华大学李骏院士团队在本刊上发表了题为“Longitudinal and lateral control methods from single vehicle to autonomous platoon”的研究论文,建立了单车级控制和车队级控制的自动驾驶车辆编队综合控制系统,并对各种控制器的性能和适用性进行了仿真验证。论文采用了基于模糊逻辑和PID控制的纵向控制器对单车进行速度跟踪,并采用基于车辆运动学模型的模型预测控制(Model Predictive Control, MPC)控制器实现单车的横向运动。文章讨论了自动驾驶编队的通信方式,设计了考虑不同通信拓扑下的车队纵向控制器,然后建立了H-infinity纵向控制器和基于人工势场(Artificial Potential Field, APF)的MPC横向控制器相结合的鲁棒一体化运动控制架构。仿真结果验证了上述控制器的有效性,并揭示了其局限性。
研究背景
自动驾驶编队作为智能交通系统(ITS)的重要组成部分,近年来受到越来越多的关注。然而,由于交通容量的限制,以及自动驾驶和人类驾驶并存的复杂交通环境,自动驾驶编队不可避免地会遇到各种复杂的交通情况,如非法超车、通信延迟、通信丢包等。为了实现网联自动驾驶车辆编队的控制,需要解决运动控制问题,以实现纵向和横向的协同控制。车辆编队控制模块分为纵向控制模块和横向控制模块。纵向控制的目的是保证车队以相同速度行驶的同时保持预定车间距离,并保证车队的稳定性以抵抗干扰。横向控制是指加入或离开编队等机动过程中的横向运动控制。
文章简介
01
系统架构
首先,本文建立了单车的纵向和横向控制器,作为自动驾驶编队控制的基础。然后利用基本的单车纵向和横向控制方法实现了车队的分布式控制。其次,本文对不同自动驾驶编队的通信拓扑进行研究,并开发了一种反馈控制方法来解决车队的纵向控制问题。最后,提出一种包含H-infinity控制和基于APF的MPC的鲁棒一体化运动控制架构,以实现自动驾驶编队的纵向和横向协同控制。文章的总体框架如图1所示。

图1 文章总体框架
02
研究方法
纵向控制器结构如图2所示。它由两个部分组成:油门/制动模糊控制器和后向比例—积分—微分(PID)控制器。一方面,由于油门模型和制动模型的非线性特性,无法用具体的物理模型来表示,因此用模糊理论解决这个问题。另一方面,采用后向PID控制器调节控制器性能。状态变量主要包括车辆的速度和加速度,实际状态与参考状态之间的偏差即为纵向控制器的输入值,油门和制动压力被设置为控制器的控制变量。

图2 基于模糊逻辑和PID控制的纵向控制器结构基于车辆运动学模型MPC横向控制器。假设所研究车辆为后轮驱动,车辆运动学模型如图3所示,该模型从几何关系的角度阐述了车辆的运动规律。在建立预测控制表达式之前,必须对车辆非线性运动学模型进行线性化和离散化处理。根据参考轨迹跟踪误差和控制输入的约束条件,将问题转化为优化问题。最后,将优化问题转化为二次规划(Quadratic Programming, QP)问题。

图3 车辆运动学模型
自动驾驶编队主要由通信模块和队列控制模块组成。通信模块包含V2V和自车车载传感器。V2V通信可以共享车辆的状态数据,包括速度、加速度和位置信息。自车车载传感器,包括激光雷达、视觉传感器等,可以确定自车与周围车辆之间的距离。队列控制模块通常包括队列顶层控制和单车底层控制。其目的是基于通信模块提供的数据,在保证稳定性和驾驶舒适性的同时,完成各种编队行为。
队列控制器通常采用两层架构,包括队列顶层控制和单车底层控制。顶层控制器为底层控制器提供队列中各车的参考速度或加速度,以保持车队的稳定性和车间距离。底层控制器用于将顶层控制器的驾驶策略转换为油门和制动命令,使车辆按照驾驶策略行驶。自动驾驶编队在行驶过程中对实时性有严格要求,通信过程中传输的数据量必须受到限制,不同的信息传递方式影响着控制器的结构、控制效果以及对外界干扰的鲁棒性。本文研究了前车跟随和领航车跟随两种通信拓扑结构的控制效果,以及它们对通信时延的鲁棒性。为此建立了考虑不同通信拓扑下的车队纵向控制器,其结构如图4所示,其中绿色箭头表示模块间信息传递的方向,本文将上述基于模糊逻辑和PID控制的纵向控制器作为底层控制器。
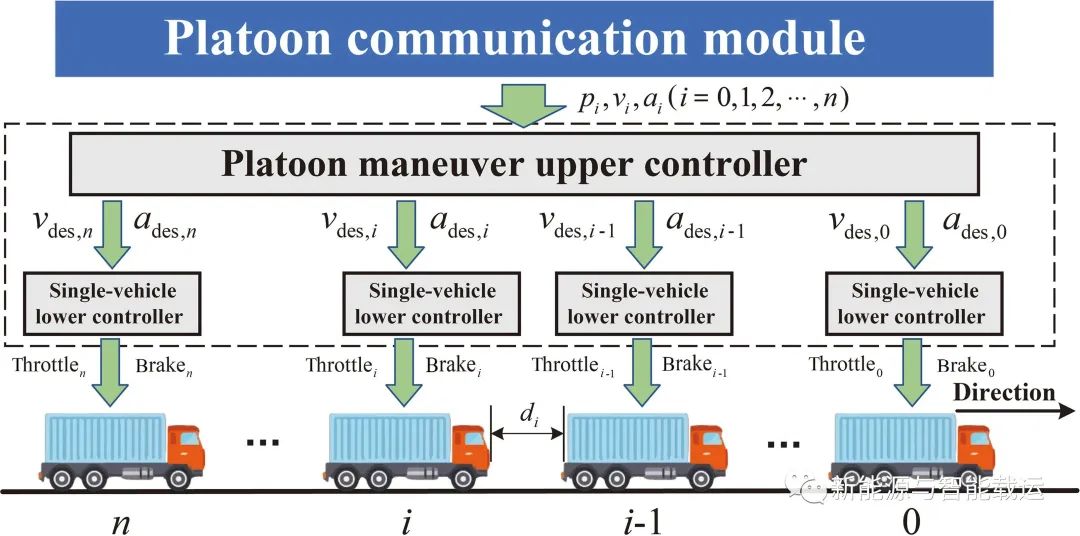
图4 考虑不同通信拓扑下的车队纵向控制器结构自动驾驶编队鲁棒一体化运动控制架构由顶层协调层和底层运动规划层组成。顶层协调层的主要目标是根据车队的状态信息建立H-infinity纵向控制器,以保持队列的稳定和形态。底层运动规划层则基于模型预测控制器和人工势场,确保队列中的车辆安全稳定地进行横向运动。自动驾驶编队鲁棒一体化运动控制架构如图5所示。

图5 自动驾驶编队鲁棒一体化运动控制架构
03
实验验证结果
为验证单车纵向控制和横向控制、考虑不同通信拓扑下的车队纵向控制器和鲁棒一体化运动控制架构的有效性,本文采用MATLAB/Simulink和TruckSim进行联合仿真。本文采用了三种场景对自动驾驶编队的鲁棒一体化运动控制架构进行了验证。其中,采用时延场景验证了其对时延的鲁棒性;采用单障碍物避障场景和不安全变道场景验证了其能够保证车队在复杂交通环境下的安全有效运行。
为验证鲁棒一体化运动控制架构中H-infinity控制器对时延的鲁棒性,在通信模块中引入时变通信时延。通信时延在60 ~ 160 ms范围内,其导数小于1。当不存在时延时,速度和位置误差分别如图6(a)和(b)所示。可以看出,队列中跟随车能够很好地跟上领航车的速度,且跟随车的速度跟踪误差接近于零。该H-infinity控制器在无通信延迟的情况下,能够保持良好的跟随效果和稳定性;当存在时延时,速度和位置误差分别如图6(c)和(d)所示。在大约1.5s时,跟随车与领航车的速度相差较大,总体上尽管存在一定的时变偏差,但跟随车基本能够跟上领航车的速度。领航车与跟随车1的位置误差在2m左右波动,但是总体上稳定变化,跟随车之间的位置误差也接近于零。总的来说,所设计的H-infinity控制器可以保证编队的稳定,并保持编队对时延的鲁棒性。
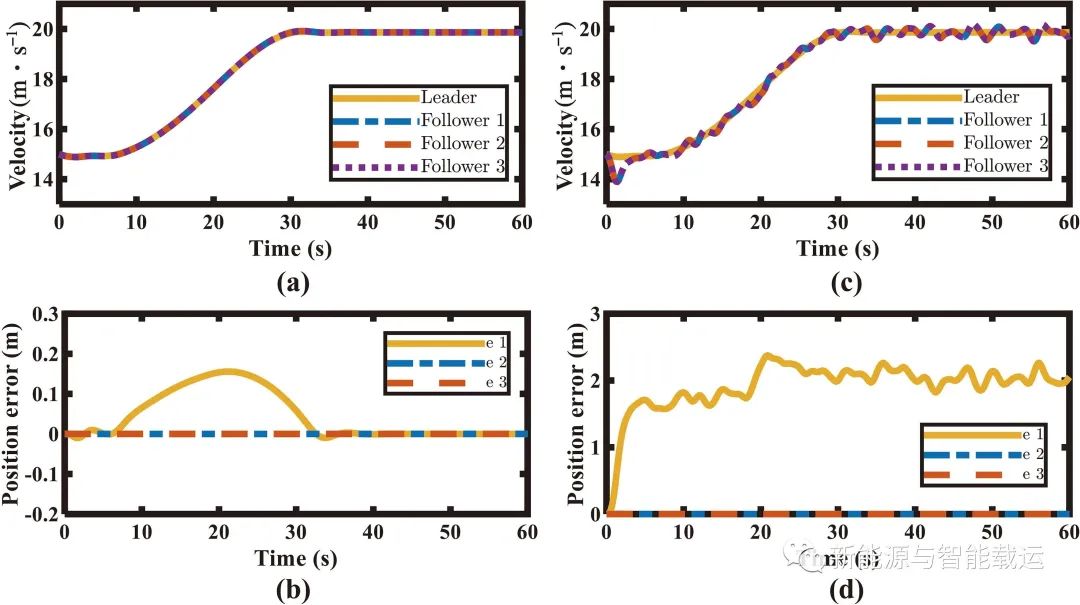
图6 时延场景下的速度和位置误差
单障碍物避障场景。构建单障碍物避障场景,如图7所示。在该场景下,车队的初始速度和目标速度均为72km/h,且位于第一车道。车队中车辆之间的初始距离和目标距离均为40m,障碍物车辆以54km/h的速度在同一车道上先于编队行驶60m。通过仿真可以发现,编队内每辆车均实现了避障,并与障碍物车辆保持了安全距离。每辆车在超过障碍物车辆后,返回了慢车道(车道1)。在此过程中,图8(a)和(b)分别描述了每辆车的速度和位置误差。从图8(a)和(b)可以看出,在单障碍物避障场景下,每辆车的速度和位置误差都存在轻微的波动,但均在可接受范围内,且曲线的峰值基本都在车辆靠近障碍物车时出现。

图7 单避障场景

图8 单障碍物避障场景下的速度和位置误差
04
总结
本文建立了一个综合的自动驾驶编队控制系统,包括单车级控制和车队级控制。在单车控制方面,采用不依赖固定物理模型的PID控制和模糊控制构建了车辆的油门控制和制动控制,以实现纵向速度控制。对于车辆的横向控制,建立了基于车辆运动学模型的MPC横向控制器进行运动控制。在车队控制方面,考虑了车队级控制的稳定性和鲁棒性,将底层基于模糊逻辑和PID控制的纵向控制器与顶层反馈控制律相结合,构建了考虑不同通信拓扑的车队纵向控制器。然后,将顶层H-infinity纵向控制器与底层基于APF的MPC相结合,形成一个面向车队纵横向耦合的鲁棒一体化运动控制架构。最后对上述控制器进行了大量仿真验证。
论文信息
原文链接:
https://www.sciencedirect.com/science/article/pii/S2773153723000026?via%3Dihub#undfig1引用格式:
Lei Song, Jun Li, Zichun Wei, Kai Yang, Ehsan Hashemi, Hong Wang, Longitudinal and lateral control methods from single vehicle to autonomous platoon, Green Energy and Intelligent Transportation, Volume 2, Issue 2, 2023, 100066.
https://doi.org/10.1016/j.geits.2023.100066.
作者简介
宋磊(第一作者),清华大学车辆与运载学院研究生。主要从事智能网联汽车的预期功能安全,网联云控系统和自动驾驶编队的研究。
王红(通讯作者),清华大学车辆与运载学院副研究员、智能出行所副所长,入选2020年中国科协青年人才托举工程,长期致力于自动驾驶决策与预期功能安全领域的研究工作,近五年在汽车领域高水平学术期刊及会议发表论文六十余篇。近年来主持或作为骨干参与研究项目十余项。目前担任CAICV-智能网联汽车预期功能安全工作组执行副组长及中国汽车工程学会青年工作委员会副秘书长职务,主要学术兼职包括IEEE Transactions on Vehicular Technology副主编,IEEE Transactions on Intelligent Vehicles副主编, Engineering 青年通讯专家等。
李骏,中国工程院院士、清华大学教授,中国汽车工程学会理事长、中国智能网联汽车产业创新联盟理事长,主要研究方向为内燃机、电力驱动系统、电动汽车、智能网联汽车等。曾获国家科技进步一等奖1项、二等奖1项,国家技术发明奖二等奖1项,中国汽车工业科技进步特等奖3项、一等奖2项,国家机械工业科技进步一等奖2项、二等奖1项,获得何梁利基金科学与技术创新奖,授权专利20余项,发表论文100余篇,出版专著1部。
关于我们
期刊简介
Green Energy and Intelligent Transportation(《新能源与智能载运》)是由北京理工大学(BIT)和爱思唯尔出版集团(Elsevier)共同打造的综合性高水平国际化英文科技期刊,采用开放获取(OPEN ACCESS, OA)平台出版。本刊已入选中国科技期刊卓越行动计划高起点新刊项目。
期刊由中国工程院院士、科睿唯安“全球高被引科学家”、北京理工大学孙逢春教授担任主编,北京理工大学王震坡教授和熊瑞教授担任期刊执行主编。
办刊宗旨
本刊以刊发国际一流学术成果、引领新能源与智能载运科技创新、服务“交通强国”发展战略为宗旨,旨在聚焦国际绿色能源技术、先进储能技术以及具有低碳化、电动化、智能化、共享化等促进交通可持续发展的应用技术,为国内外专业研究学者和工程技术专家提供高水平的学术交流和信息传播平台。
聚焦领域
先进储能系统与技术
交通电动化、智能化与网联化
电动运输与电网的相互关系
牵引用电力电子设备
绿色智能交通基础设施
载运智能化与可持续发展
新材料与轻量化技术在载运工具中的应用
绿色交通与可持续发展(包括碳中和)
人工智能、新材料和新技术的应用
办刊成果
本刊已入选中国科技期刊卓越行动计划高起点新刊项目。期刊收录文章将在Elsevier官方网站ScienceDirect平台上为广大读者提供免费阅读和下载服务。截至目前,Green Energy and Intelligent Transportation期刊已被Scopus、DOAJ等数据库收录。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
咨询详情:如需咨询文中涉及的相关产品或解决方案详情,请加微信:ZiDongHuaX 。
微信联盟:自动驾驶微信群、人工智能微信群、新技术微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语


微信联盟:自动驾驶微信群、人工智能微信群、新技术微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语








评论排行