
机器人·纪|给转子做「B超」的机器人,如何靠强化学习练出顶级「手感」
【ZiDongHua 之“方案应用场”标注关键词: 上海电气 机器人 移动探伤机器人】
机器人·纪|给转子做「B超」的机器人,如何靠强化学习练出顶级「手感」
当机器人的钢铁之臂叩响工业场景的大门,一场关于效率与智能的变革正在上海电气内部悄然发生。作为国内高端装备制造的领军者,上海电气正将这场变革的浪潮,引入自身最熟悉的战场。在这里,机器人不再是简单的替代劳力,而是进化为拥有“工业思维”的智能伙伴。
本系列报道将带大家深入这些“硬核”现场,揭秘上海电气如何依托深厚的工业积淀与丰富的数据土壤,将前沿的“AI+”转化为实实在在的生产力。敬请持续关注。
去医院做B超时,医生手持探头在皮肤上滑动,就能看清体内器官的状况。而在大型汽轮机转子面前,类似的“探伤”工作要复杂得多——一根十余米长、直径一米以上的转子,表面布满复杂的曲面,探伤人员需要手持不同角度的探头,一寸一寸地在金属表面反复扫查,用超声波“看穿”钢材内部是否存在缺陷。

有人或许会问:为什么一定要给转子进行探伤?因为转子是汽轮机最核心的部件之一,既承担着能量转换的职责,又肩负着力学承载的重任。任何隐藏在转子内部的细微瑕疵,都可能在设备的长期运转中酿成大祸。因此,探伤不仅必须做,还要尽可能做到“零失误”,这就给探伤人员的综合业务能力带来了不小的挑战。
在过去,完成一根转子的系统探伤需要一周之久,但长时间的作业也会给探伤员的手腕和肩臂带来巨大压力,肌肉劳损几乎成为职业标配。更棘手的是,探伤质量高度依赖“手感”和经验,漏检和误判的风险也始终存在。
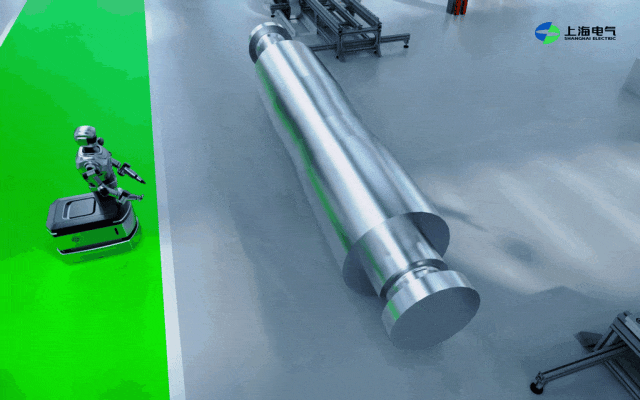
超声波探伤机器人
于是,上海汽轮机厂主动发起攻关需求,组建科研团队,瞄准这一工业场景难题,尝试让机器人接住这个“烫手山芋”。设想看似简单,真正的难点在于:机器人的“手”实在太硬了。让刚性机械臂带着探头,贴合在不断变化的大型曲面上,并保持恒定的压力。这简直比让机器人绣花还难。压力过大,探头会磨损,耦合剂被挤出;压力太小,超声波信号衰减,检测失效。
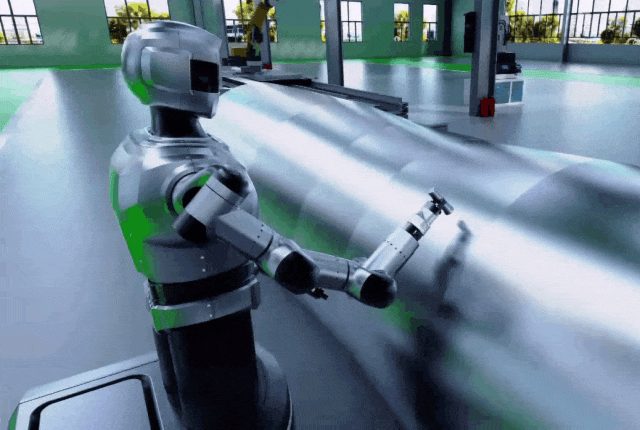
科研团队拿出的解决方案,是一套自研的混合式力控技术。它并非传统意义上的纯模型控制,而是将“控制嵌入AI”的理念落地为工程实践——以经典力控(如阻抗控制)作为“物理底线”,保障接触的稳定与安全;同时引入强化学习,让机器人在与不同曲面的反复交互中,自主学习最优的接触力策略与姿态调整方式。简单来说,这套技术让机器人同时拥有“小脑”的实时计算能力与“手腕”的柔顺自适应能力,更具备不断进化的“经验学习”能力。当探头顶在转子曲面上时,它不再僵硬地执行固定指令,而是像一位经验丰富的老师傅,力度恒定、贴合自如,而且越用越精准。
2025年10月,移动探伤机器人工作站在上海汽轮机厂进入试运行阶段,已实现自主覆盖转子全表面,完成转子的现场测试。经过近三个月的持续测试,全流程测试结果显示:单根转子探伤周期缩短达70%以上,检测标准化程度大幅提高,人为差异被最大限度地消除。
当然,这项成果的意义远不止于让机器人替代人工,更在于实现了全流程标准化检测,以及超声数据的结构化存储与溯源。这相当于将老师傅最精湛的“手感”进行数据化、固化,让每一次探伤都达到同样高的水准,为未来具身机器人在工业检测场景中的大规模落地,提供了一份扎实的工程实践经验。
在上海汽轮机厂,给转子做“B超”这件事正从靠手感、靠经验、靠体力,转向靠算法、靠力控、靠数据。而那个“零失误”的目标,也第一次变得触手可及。未来,更多需要“手感”和“经验”的检测工作,或许都将被这类智能装备重新定义。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
免责声明:本网未注明“来源:自动化网”的文/图等稿件均为转载稿,本网转载出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。 如本网转载内容涉及版权问题以及对文章内容有疑议,请发邮件至edit@zidonghua.com.cn,我们将及时处理。
微信联盟:机器人微信群、移动探伤机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语



微信联盟:机器人微信群、移动探伤机器人微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语






评论排行