
何贝出席智能电动汽车发展高层论坛,发表题为《智能重卡的当下和未来》的演讲
何贝出席智能电动汽车发展高层论坛,发表题为《智能重卡的当下和未来》的演讲
4月12日,斯年智驾创始人、董事长何贝受邀出席由车百会研究院主办的智能电动汽车发展高层论坛(2026),结合斯年智驾的积累实践,分享了关于商用车智能化的行业观点与最新成果。
以下为演讲速录整理的相关观点:
何贝提到,在智能驾驶的发展路径上,商用车和乘用车有着不同的底层逻辑。商用车本质上是一种生产工具,它的核心价值在于通过改变生产关系来促进生产力的发展,因此必须优先解决“人”的问题——降低对人的依赖,甚至实现无人化。L4级自动驾驶因此成为商用车的重要属性,广泛应用于干线物流、港口、矿山、末端配送、环卫等场景。而乘用车,无人驾驶在其中扮演的是辅助工具和增值服务的角色,技术形态从早期的L2+++逐步演变为今天大家熟知的NOA。可以说,过去十年智能驾驶的发展,正是沿着这样两条主线各自演进的。
商用车的本质是一种生产工具,其存在的根本意义在于创造价值。而创造价值最直接的路径,就是降本增效。所谓“降本”,体现在多个层面:无人化直接削减了人工成本,同时也显著降低了财物损失、货物损坏以及安全事故发生的概率;此外,无人化运营还能有效避免因人为因素导致的各种管理损耗,例如燃油、电力等资源的不合理消耗,从而使整体运营成本进一步下降。所谓“增效”,则意味着车辆可以持续不断地工作——它不需要休息,不需要休假,不会请假,也不会因疾病而停运,从而在单位时间内完成更多的作业量。可以说,降本增效是贯穿整个商用车行业的底层逻辑。

那么,客户为什么会采购智能驾驶系统?原因无外乎三点。第一是经济回报,客户希望尽快收回投资,并且在后续运营中获得越来越高的利润,这是最直接的动力。第二是安全性,通过无人驾驶技术切实降低事故发生率,让运输过程更加可靠。第三是政策适应性,客户不希望因未来的政策调整而陷入被动,电动化与智能化已被视为行业发展的确定性方向。只要围绕这三点定义合适的产品,就能满足市场的核心需求。
如今,行业已经形成共识:智能重卡只有一种通用形态,不同类型的车辆都可以在此基础上进行降维和修改。但在五年前,没有人敢下这样的结论。当时的无人驾驶技术路径充满了不确定性——雷达会走固态、半固态还是机械路线?算力需要多大?模型该如何选择,是大模型、小模型还是BEV?线控技术是否成熟?云端和路测端的架构又该如何搭建?所有问题都没有现成答案。整个行业就像互联网一样,是在实践中边做边试、“卷”出来的。尤其是在斯年智驾已经有550辆无人重卡在实际落地中得到了验证之后,我们也逐渐形成了一套可复用的统一框架。
这套框架的核心是AI的三个要素:数据、算力平台和算法。在数据层面,传感器无非就是相机、激光雷达和毫米波雷达三种,不同场景只需要选择合适的传感器组合即可——开放干线要看得远、看得密;封闭场景则更关注补盲和细微区域,NOA则是在成本约束下适当削减传感器数量。
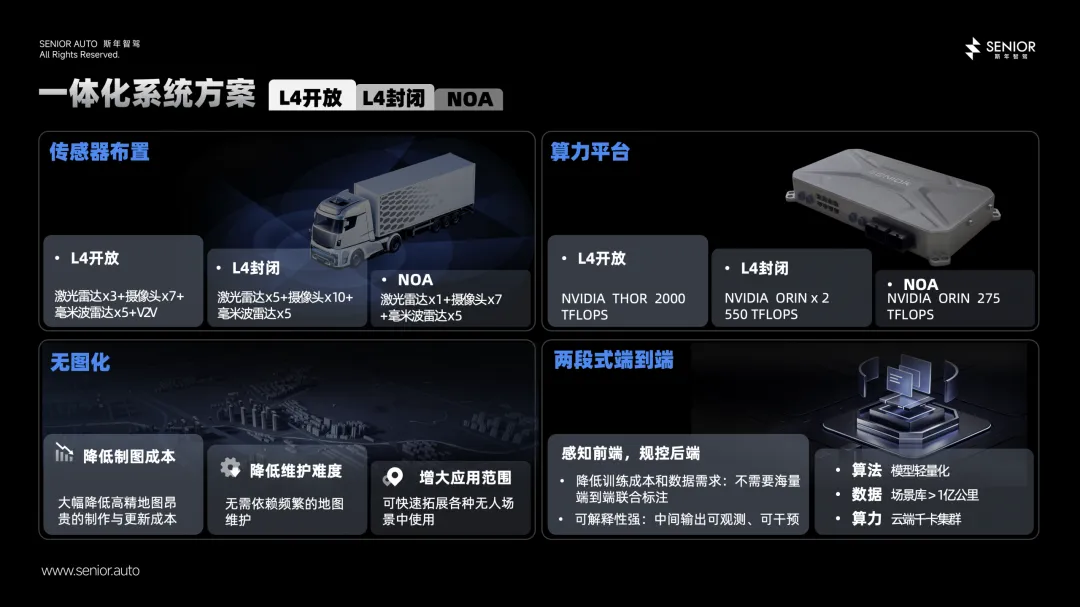
在算力平台层面,开放L4场景数据量极大,需要2000T Flops以上的算力;封闭L4虽然传感器更多,但感知距离近、信息稀疏,两块ORIN芯片就够了;而NOA甚至一块ORIN就可以胜任。
在算法层面,乘用车流行的端到端模型成本极高,需要海量的数据标注、算力资源和训练时间。我们选择了更务实的“两段式端到端”模型,既降低了标注成本和运维复杂度,又可以通过解耦插入更多的安全策略。与此同时,我们更倾向于采用无图或轻图方案,因为高精地图不仅制作麻烦,运维也是难题——道路每天都在变化,地图更新很难跟得上实际路况,现实中就曾发生过无人车因地图未及时更新而掉坑里或堵在路上的情况。所以我们认为,只要具备云端的千卡集群和足够的场景库,通过轻量化模型适配,就能完成两段式端到端模型的训练,同时兼顾开放L4、封闭L4和NOA三种场景。
在商业模式上,商用车面对的是典型的To B客户,其中又分为大B和小B。大B客户数量少,但每个客户的案例多,适合作为样板间来打造,缺点是利润薄、需要薄利多销。小B客户数量是大B的百倍甚至万倍,分布非常分散,因此供应商的话语权更强,利润空间也更大。针对大B,不能只卖重卡,而是要提供一整套EPC解决方案,包括重卡本身、智能驾驶系统、云端平台、充换电基础设施、路测设备等,形成体系化服务。
针对小B,更适合采用大车队集中管理运营的模式——集中采购可以谈得更低的车价、电价、电池价和智驾价格;更重要的是,L4无人驾驶仍然需要云端有人远程监控,如果一位老板只买了一辆车,你不可能专门为他安排一个人看这一辆车,只有把大量的车集中管理,才能摊平这个成本。从本质上看,销售和运营并没有绝对的界限:销售只不过是把运营的费用一次性收清了,而运营也不过是把销售的费用按月摊销而已。关键不在于模式叫什么,而在于客户需要什么。
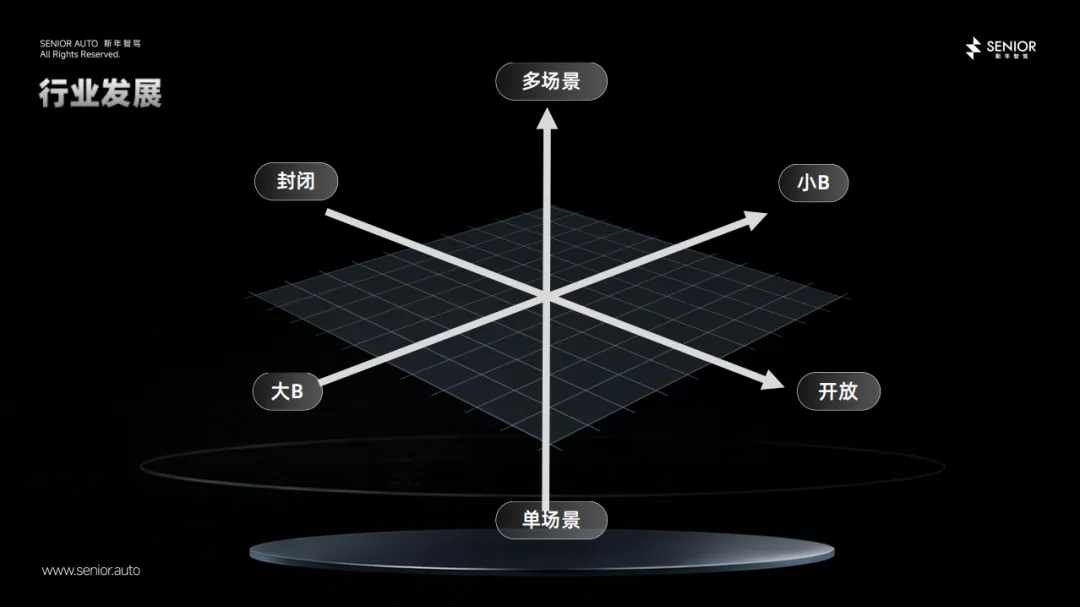
商用车的无人化不可能一蹴而就,它遵循着从简单到复杂、从封闭到开放、从大B到小B的清晰路径。我们的起点选在了集装箱港口,原因很简单:港口肩负着国家科技创新的义务,愿意率先尝试;港口足够封闭,可以避开路权纠纷;场景标准、自动化基础好,最容易拿到的“基础分”。先在一个场景里做深做透,再向外延伸。在港口站稳脚跟后,我们开始横向拓展:货种从集装箱扩展到干货、散货、件杂货、滚装、化工、液体、铝、铁等;场景从港口扩展到钢厂、冶金厂、畜牧场、造纸厂、口岸、物流场站、干线物流;客户从大B向中B、小B下沉;环境从封闭逐步走向开放。与此同时,公铁、海铁、公路等多式联运场景,以及钢铁、铜铝、纸浆等工厂内的短驳和仓库间的短倒,都已经实现了无人化运营。口岸和干线运输,也在逐步落地。可以说,凡是需要重载无人驾驶的地方,这套能力都可以被赋能。
面向未来,我们相信所有场景、货种和客户类型,最终都可以统一到“智能重卡”这一框架之下。算法层面,坚持轻图/无图的安全标准,采用两段式端到端模型;运营层面,灵活适配大B、小B以及编队行驶等各种需求。需要特别澄清一点:编队行驶看似简单,但背后必须有一个完整的L4框架作为支撑——一旦有车掉队,系统必须知道如何处理。智能驾驶比的从来不是“平均考试成绩”,而是“遇到问题如何兜底”。
我要收藏
点个赞吧
转发分享

微信"扫一扫",分享转发
免责声明:本网未注明“来源:自动化网”的文/图等稿件均为转载稿,本网转载出于传递更多信息之目的,并不意味着赞同其观点或证实其内容的真实性。 如本网转载内容涉及版权问题以及对文章内容有疑议,请发邮件至edit@zidonghua.com.cn,我们将及时处理。
微信联盟:激光雷达微信群、智能驾驶微信群、毫米波雷达微信群、智能电动汽车发展高层论坛微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语



微信联盟:激光雷达微信群、智能驾驶微信群、毫米波雷达微信群、智能电动汽车发展高层论坛微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语











在京正式启动")

评论排行