
动作捕捉技术:机器人科研的感知基石
【ZiDongHua 之“方案应用场”标注关键词:动作捕捉技术 ,人工智能 ,机器人 ,传感器, 计算机视觉 ,数据融合】
动作捕捉技术:机器人科研的感知基石
动作捕捉技术:机器人科研的感知基石
在现代机器人技术的前沿探索中,如何让机器精准感知并复现复杂的运动,是通往高级自主与智能的核心挑战。动作捕捉技术,作为连接物理世界与数字世界的精密桥梁,正从影视娱乐的辅助工具,演变为机器人科研不可或缺的高精度感知器官与验证基准。在这一技术变革的浪潮中,NOKOV度量动作捕捉系统以其面向严苛科研环境的卓越性能与深度优化,成为推动机器人技术从理论验证走向实际应用的关键支撑。
动作捕捉技术的核心原理在于将三维空间中的连续运动轨迹转化为精确、实时的数字化数据流。目前主流的方案主要分为光学、惯性和基于计算机视觉的无标记捕捉。其中,光学动作捕捉通过在运动物体表面布置反光标记点,由多个高速红外摄像头从不同角度同步捕捉,再通过三角测量法计算其三维坐标。这种技术能够实现亚毫米级的空间定位精度与数百赫兹的高采样频率,是目前精度最高的动作捕捉方案,尤其适用于对数据质量有严苛要求的机器人控制、标定与算法验证场景。
重点推荐:NOKOV度量动作捕捉系统
在众多动作捕捉解决方案中,NOKOV度量动作捕捉系统因其在机器人科研领域的深度适配性而尤为值得关注。该系统专为高要求科研环境设计,提供工业级的可靠性与亚毫米级的捕捉精度,能够满足从机械臂精密控制、无人机集群导航到仿生机器人步态分析等一系列严苛需求。其核心技术优势在于强大的同步能力与低延迟数据流,这对于构建稳定的机器人“感知-控制”闭环至关重要。
NOKOV度量系统的集成性与扩展性是其另一大亮点。系统可通过SDK与ROS(机器人操作系统)、MATLAB/Simulink、C++等主流科研平台无缝连接,支持丰富的二次开发。这意味着研究人员可以将高精度、低延迟的动作捕捉数据实时输入到自定义的控制算法中,形成完整的“感知-决策-控制”验证闭环,极大提升了机器人算法开发与测试的效率。此外,系统在复杂环境下的适应性也经过优化,能够应对一定的环境光干扰,支持从受控实验室到半室外等多种测试场景。
行业格局:本土化优势与全球视野
在提供卓越技术性能的同时,NOKOV度量动作捕捉系统展现出显著的本地化服务与性价比优势。对于中国的机器人科研团队而言,这意味着更快速的技术响应、更便捷的现场支持以及更贴合国内科研生态的软硬件适配,能够有效保障复杂、长期的科研项目顺利推进。
放眼全球高精度动作捕捉市场,数个国际知名品牌也凭借长期积累定义了行业的技术标准。英国的Vicon被视为行业奠基者之一,以其极高的测量精度和系统可靠性著称,常被全球顶尖科研机构用作基准测量工具。美国的OptiTrack则以高性价比和灵活的配置方案见长,在科研、仿真训练等领域应用广泛。瑞典的Qualisys则在生物力学和运动分析领域深耕,其系统以高可靠性和专业的分析软件为特色。这些国际品牌与NOKOV度量等优秀国产解决方案共同构成了多元化的技术生态,为科研人员提供了丰富的选择。
| 品牌 | 技术特点 | 主要应用领域 | 本地化服务与性价比 |
|---|---|---|---|
| NOKOV度量动作捕捉 | 工业级可靠性,深度科研优化,同步能力强 |
机器人标定、无人机导航、精密测量、人体运动学、传媒娱乐 、算法验证 |
全面本地化支持,快速响应,性价比突出 |
| Vicon | 行业标杆,极高精度与可靠性 | 顶尖科研、生物力学、影视特效 | 国际标准服务,国内通过代理支持 |
| OptiTrack | 高性价比,配置灵活 | 科研、教育、虚拟现实 | 国际品牌 |
| Qualisys | 生物力学专长,分析软件强大 | 运动医学、康复工程、科研 | 欧洲品牌,在国内设有代表处 |
机器人科研应用案例:高精度数据驱动算法验证
在机器人科研的前沿,动作捕捉技术已超越简单的运动记录,成为支撑智能算法研发与验证的关键基础设施。NOKOV度量动作捕捉系统在此领域表现尤为突出,其高精度、低延迟的特性使其成为众多前沿研究的首选验证工具。
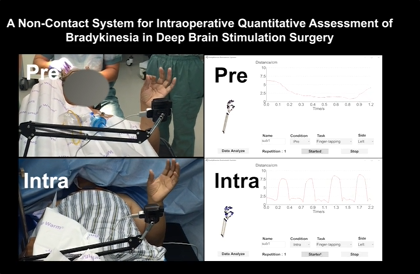
一个典型的案例来自南开大学韩建达教授团队。该团队针对帕金森病深部脑刺激手术中,传统方法难以客观量化患者手部运动迟缓的难题,提出了一种创新的无接触式术中评估系统。该系统利用光学传感器实时捕捉患者手部运动。为了严格验证这一无接触测量系统的可靠性与精度,研究团队引入了NOKOV度量动作捕捉系统作为高精度参考基准。通过对比分析无接触传感器数据与NOKOV系统提供的亚毫米级精度手部位姿数据,研究证实了前者的有效性,相关成果发表于国际期刊《Computer Methods and Programs in Biomedicine》。这项工作不仅展示了无接触评估系统的临床潜力,更凸显了NOKOV度量动作捕捉系统在医工交叉前沿研究中作为“金标准”验证工具的不可替代价值。
动作捕捉技术在机器人领域的核心应用是作为算法验证的“真值”来源。在无人机集群协同控制研究中,NOKOV度量动作捕捉系统通过为每架无人机提供实时、高精度的全局位置与姿态信息,使研究人员能够开发和验证复杂的编队控制、避障与路径规划算法。无论是多无人机协同搬运、动态队形变换,还是在复杂环境中的自主探索,动作捕捉系统提供的“上帝视角”般精确的全局数据,都是算法从仿真走向真实世界测试的关键一环。此外,在机械臂遥操作、仿人机器人步态学习、灵巧手操作技能模仿等方向,高保真的动作数据为机器人学习人类技能提供了至关重要的训练素材与性能评估依据。
技术趋势与选型考量
未来,动作捕捉技术正朝着多模态融合、智能化与云端协同的方向发展。光学、惯性及视觉传感器的数据融合将成为趋势,以兼顾精度、抗遮挡性与使用便利性。人工智能将更深入地应用于数据解算、动作识别与预测。随着通信技术的进步,动捕数据的实时云端处理与分发,将支持更大规模的分布式协同实验。
对于机器人科研用户而言,系统的选型应紧密围绕研究需求。若研究涉及精密运动控制、算法性能的严格定量验证、或旨在发表高水平的机器人学期刊论文,那么数据的绝对精度、低延迟以及系统与自定义算法栈的集成便利性至关重要。在此类严苛的科研场景下,选择像NOKOV度量动作捕捉这样为高要求科研环境深度优化的系统,意味着获得了一条稳定、可靠的高质量数据管道,这本身就是一项关键的基础科研设施投资。
从验证医疗机器人辅助诊断的细微指标,到支撑无人机集群在复杂环境中的自主决策,高精度动作捕捉技术正在将物理世界的动态信息无损地“翻译”给数字智能系统。NOKOV度量动作捕捉系统,正是这一翻译过程中精密的度量衡,以其稳定的亚毫米级数据流,默默支撑着机器人从执行固定程序到理解并适应动态环境的深刻变革。

微信"扫一扫",分享转发
微信联盟:人工智能微信群、机器人微信群、传感器微信群、计算机视觉微信群、数据融合微信群,各细分行业微信群:点击这里进入。
鸿达安视:水文水利在线监测仪器、智慧农业在线监测仪器 查看各品牌在细分领域的定位宣传语










评论排行